说在前面的话:长文预警。除了介绍CNN外,还有许多作者对当前深度学习及AI行业的见解。另外,配置theano真的恶心(无奈代码用的是theano,否则早用tensorflow了,我的anaconda是卸了装,装了卸,到现在还没搞好),所以目前代码都没跑过,只能阅读分析了。
在介绍CNN前,先看一下network3.py中的FullyConnectedLayer类:
1 | class FullyConnectedLayer(object): |
init就是初始化一些参数,这里bias初始化为(n_out,)形状,其实就是一个n_out列的一维数组,这样使得它在后续的运算中有扩展性,可以同时加到mini_batch个数据上。需要注意p_dropout是被dropout的概率,因为我们要使用dropout方法了(具体实施后面会说),初始化权重和bias时采用的是theano的共享变量,指出了变量名分别为’w’和’b’,borrow参数设置为True,表示变量可以被后续操作更改。set_inpt方法是输入数据并计算出output的,注意设置input时用了两种方法,self.inpt和self.output用于validation和test,它们没用用dropout,虽然输出时前面乘了(1-self.dropout),但这只是把所有元素都缩放了相同的倍数,实际上并没有用到dropout(虽然我不知道到底乘了干嘛)。self.inpt_dropout和self.output_dropout用于train,它们真正用了dropout,其中的dropout_layer函数如下:
1 | def dropout_layer(layer, p_dropout): |
由于不了解theano,我只能知道它的大体思想是通过随机流srng生成一个与layer同shape的二项分布,将其数据格式转换成与w、b相同的theano.config.floatX后与layer做内积,这样就达到了随机舍弃部分neuron的目的,注意舍弃的数目由p_dropout控制。这个函数我觉得很巧妙:将理论上的舍弃——即要么是0要么是1用二项分布实现。
Convolutional networks
之前的全连接网络总给人一种“暴力求解”的感觉,因为由于其全连接性,导致每一层似乎都把输入图像的许多特征都糅合起来,即没有考虑图像的空间结构spatial structure(说的有点模糊,意会即可),而CNN则很好地使用了图像的spatial structure。
Local receptive fields
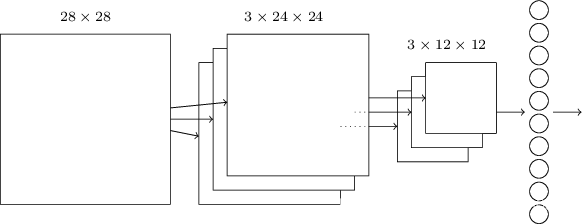
之前我们的输入是784×1的数据,现在CNN中的输入是28×28的数据,此时取一个固定大小的“窗口”,从图片左上角以一定的步长从左到右、从上到下移动到右下角,即(可能有重叠地)覆盖整张图片,每次移动,整个这个“窗口“的内容都会被映射成一个数字(具体方法接下来介绍)。这个”窗口“即为local receptive fields,移动的”步长“即为stride length,以5×5的”窗口“,步长1为例如下图:
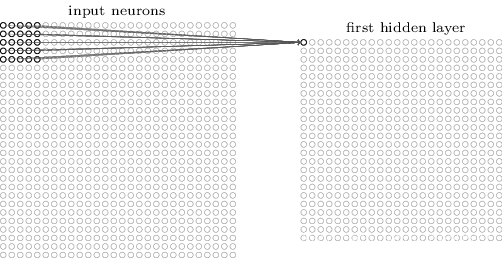
很容易看出原本28×28的图片经过这样的处理变成了24×24。
Shared weights and biases
和FC net相邻两层的神经元两两之间都有各自的weight不同,CNN采用共享的权重和偏置。
上面提到了以窗口为单位映射的方法,如何把一个窗口内数据映射为单个数值?仍以上面5×5的窗口为例,将其与一个5×5的weight做内积(即convolution,这也是CNN名字的由来)即可。事实上,对于窗口覆盖完图片这一整个过程,每次映射采用的weight都是一样的,至于bias则是在所有内积做完后再加上。于是这样一个不变的weight就可以想象提炼成图片的一个特征,随着窗口内数据的变化,得到的output内容也不同,并且其仍会呈现spatial structure。所以,这样一整个映射就是一次feature map,其weight和bias即为shared weight和shared bias,这两个参数也定义了kernel or filter(也就是原来的神经元,只不过由于共享参数它便具有了”过滤”特征的功能)。
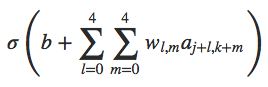
上式w是一个5×5的矩阵,显然(j,k)对应的是当前窗口左上角的”坐标“。
事实上,提取的特征也并不局限在一个,图像识别需要更多的特征——多搞几个weight就是了,早期的LeNet-5就采用了6个特征,其local receptive field也是5×5,所以,原本的28×28数据就变成了6×24×24的数据,也可以看成此时有了六个filter。将特征(20个)可视化可以更清楚地理解feature map的过程:
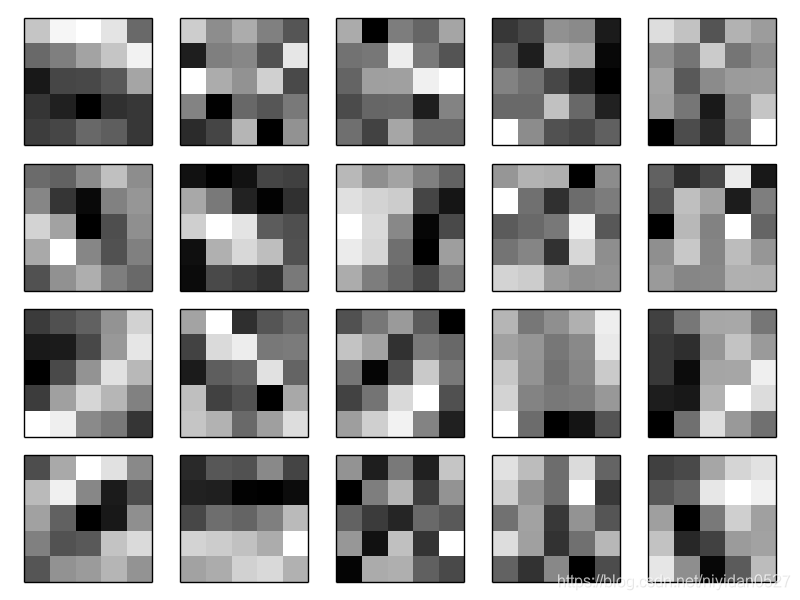
颜色较深的像素对应着较大的weight元素,反之则较小。其实最后训练好的weight有些可以看出其对应feature,比如轮廓等,但大部分是看不懂的。
于是,CNN参数显然远远少于FC net,这就意味着更高的学习速度,更深的网络。这里再贴出我的一张笔记:
.PNG)
Pooling layers
池化层通常紧跟着卷积层,作用是简化信息——其实就类似于缩小图片。max-pooling是很常用的一种池化方法,在卷积层的24×24取一个窗口(先以一个feature为例),不妨设窗口大小为2×2,取其中灰度值最大的像素(如果是RGB三色通道貌似看RGB平均值),其他三个像素丢弃,如下图(貌似池化层的窗口不重叠):

实际操作效果就类似于缩小图片。这里了解一个概念:平移不变性,我只是偶然想到这个概念,[知乎这个回答](深度学习cnn中,怎么理解图像进行池化(pooling)后的平移不变性? - 三符的回答 - 知乎 https://www.zhihu.com/question/34898241/answer/60705313)感觉说的不错,这位答主还提到了***average pooling(另一种池化方法,此外还有L2 pooling***——取窗口数据的均方根)对背景保留更好,max pooling对纹理提取更好。可见相对于其他特征,某个特征的具体位置并不算重要。
对于多个feature map,每一个map后的output都要pooling:
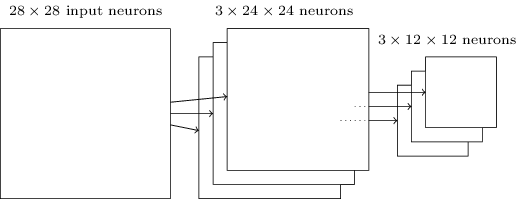
需要说明的是,这里把pooling layer单独看作一层,但由于其往往连在卷积层之后,所以它和卷积层也可以一起看作一层,即convolutional-pooling layers:
1 | class ConvPoolLayer(object): |
有一点疑惑是,在初始化权重时,根据注释,假设filter_shape=(20,1,5,5),那么n_out就等于20×(5×5)/(2×2)=125,有点搞不明白。倒数第二行的dimshuffle()方法可以把原本shape为(20,)的bias转换为(1,20,1,1)shape,由此可见输出的shape为(1,20,1,1),但theano中conv_2d、pool_2d方法具体运算过程我还是没有透彻了解,这里需要加强学习。
Putting it all together
至于最后的输出,只要在最后加一个FC层即可:
FC层的十个neuron与池化层的三个neuron(应该是3个吧)全连接,训练方法与FC net一样采用SGD和BP算法,只不过其具体过程不似之前那般简单,作者也以Problem的形式提出来,我暂且还没有思考。
上面是最简单的CNN,其实卷积池化层、FC层的数量都不限于一个,择优录取即可。
FC层默认的激励函数是sigmoid,然而输出层还可以用Softmax(更常见):
1 | class SoftmaxLayer(object): |
与之前的layer大体相同,一点不同是,Softmax将权重和偏置都初始化为0,因为之前对它们初始化的方法的讨论都是基于sigmoid的,对Softmax未必适用,所以干脆直接初始化为0。另外里面还用到了theano的softmax网络,具体还要去看theano手册。
有了基本的layer,就可以用他们搭建一个网络了,初始化过程包括各种参数以及前向计算方法:
1 | class Network(object): |
然后和之前的代码一样用SGD训练,先看一部分代码:
1 | def SGD(self, training_data, epochs, mini_batch_size, eta, |
这里初始化了数据集,计算了三个数据集中各自mini_batch的数目,并且使用了L2 regularization,给出了cost的表达式和更新参数的公式,这里theano.tensor中的grad方法直接给出了cost对于weight和bias的导函数,大大减少了代码量。
1 | # define functions to train a mini-batch, and to compute the |
这段代码初看有点令人头大,但实际上非常简单,首先用T.lscalar()初始化一个long int用于表示mini_batch index,接下来的theano.function是重头戏,这里是该方法源码,这篇blog介绍的也很好,简单来说,该方法就是通过input(即第一个参数[i])返回待计算的output(第二个参数,cost、accuracy等),计算过程中需要用到updates(如果有需要更新的参数,输入形式是(shared variables,update expression))和givens(上面的代码用的是字典,每次都会根据input更新,但字典的key不变)。
所以,上面其实就是定义了四个函数,分别是训练cost、验证accuracy、测试accuracy和预测函数,前三个有点类似于network2.py中的四个指标。
接下来的代码用到了上面的四个函数:
1 | # Do the actual training |
iteration是迭代mini_batch的轮数,每满1000轮输出一条信息。一个epoch将所有的traning_batches迭代一遍,并且在每个epoch最后一次迭代后(cost_ij算完后)计算验证集accuracy,更新最佳验证精度,并记住最佳验证精度对应的迭代轮数best_iteration。
Practical application of CNN
为提高减少overfitting,作者通过expand_mnist.py手动扩大数据集,具体代码没有看,据作者自己介绍,是通过上下左右各移动一个pixel实现的,所以原来的50000条data就扩大到了250000条。另外,通过采用多FC层、将每个FC层neuron数增至1000、在其中使用dropout、用ReLU作为激励函数、采用Softmax等方法,最终作者得到了99.60%的准确率。
1 | net = Network([ |
作者训练了5个这样的网络,通过投票策略识别手写数字,又将准确率提高到99.67%。
值得一提的是,作者只在FC层用了dropout策略,卷积池化层并没有,这是因为后者由于共享权重的机制(每个权重只学一个feature,学到的noise较少),本身就不易overfitting。
之前提过unstable gradient的问题,那这章是怎么解决的呢?作者这里说的有点模糊
Of course, the answer is that we haven’t avoided these results.
说白了,并没有明确的一个方法解决unstable gradient。但采用了其他许多方法(除了上面提到的外,还有使用GPU等)提高学习速度、减少overfitting,并得到了不错的accuracy。
Recent progress
这篇博客介绍了最近的一些深度学习论文,立个flag:把这些论文都研究一下。
2014年的ImageNet Large-Scale Visual Recognition Challenge (ILSVRC)竞赛上,GoogleLeNet以93.33%的accuracy获胜,在许多物体的识别上与人类不相上下甚至超过人类。2013年Google的一个团队用深度卷积神经网络识别街景街道号,达到了与人类差不多的准确率,在一些区域为GoogleMap的地理编号提供了巨大帮助。是不是这些就代表ANN性能已经超过了人类视觉?答案是否定的,它的训练、测试数据都是从网络爬下来的,而这些数据与实际应用往往有着较大差异,并不具有代表性,我的理解是ANN在“抗噪”能力上ANN远不如人类。2013年的一篇paper Intriguing properties of neural networks中指出,深度网络会面临effectively blind spots的问题:在能够被正确分类的图像上添加一些噪音会导致分类错误——尽管人眼看上去处理过的图片(adversarial negatives)与原始图片差异并不大:
可能网络把原本连续的函数学习成了不连续的函数,幸运的是这种情况实际操作中并不多见,就像有理数在实数轴的分布一样,但这仍值得探究。
Other techniques
除了之前提到的FC net、CNN外,还有神经网络模型。
RNN&LSTMS
之前的所有网络其结构都是固定的,recurrent neural network(RNN)却不是这样,其结构是动态的,即RNN某一层的activation不仅受到前层的影响,同时也受到之前自己输出的影响。这种动态性使得RNN在视频处理、语音识别等领域效果很好。然而,仅仅是空间的连接就会导致unstable gradient,加上时间势必导致更严重的问题,所以RNN需要选择性地接受前段时间的activation,所以就有了Long short-term memory units(LSTMS)。
.PNG)
DBNS&Boltzmann machine
DBNS全程deep belief networks,它除了可以前向运算(e.x.图像识别)外,还可以被指定一些特征神经元的值后“反向运行”产生“输入值”,即它不仅有“读”的能力,还有“写”的能力。此外,以图像识别为例,DBNS还可以将学到的特征用到其他图片上(说的很概括),即便那些图片没有label,这样就可以实现无监督或半监督学习。Boltzmann machine则是DBNS的关键组成部分。
Epilogue
在系统设计与工程方面有Conway’s law:
Any organization that designs a system… will inevitably produce a design whose structure is a copy of the organization’s communication structure.
说的就是我们要理解系统的结构,然而对于AI这个law却不那么适用,因为我们甚至都不知道AI的组成、基本问题,换言之,AI更偏向于是一个science而不是engineering。以医学为例,由最初简单的看病演化出了诸如药理学、解剖学等许多重要分支,所以作者指出science上的Conway law:
And so the structure of our knowledge shapes the social organization of science. But that social shape in turn constrains and helps determine what we can discover.
反观当前deep learning,许多工作仍然局限在用SGD最小化cost上,尚未延伸出深远的子领域,从这点来说,deep learning还是一个相对较shallow的领域。